Measurement & mixed states for quantum systems.
Notes on measurement for quantum systems.
This post documents my implementation of the Random Network Distillation (RND) with Proximal Policy Optimization (PPO) algorithm. (continuous version)
Random Network Distillation (RND) with Proximal Policy Optimization (PPO) implentation in Tensorflow. This is a continuous version which solves the mountain car continuous problem (MountainCarContinuous-v0). The RND helps learning with curiosity driven exploration.
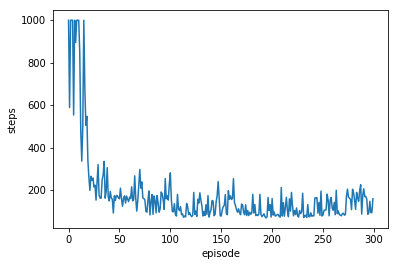
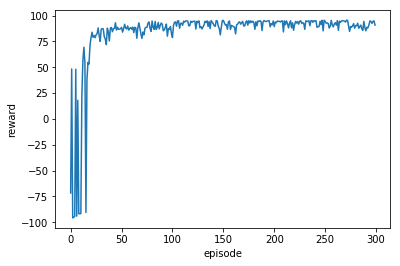
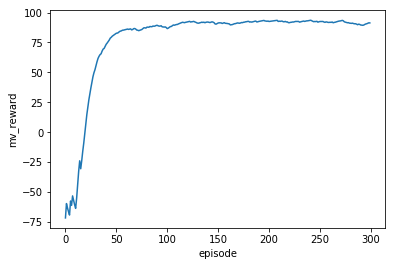
The agent starts to converge correctly at around 30 episodes & reached the flag 291 times out of 300 episodes (97% hit rate). It takes 385.09387278556824 seconds to complete 300 episodes on Google’s Colab.
Edit: A new version which corrects a numerical error(causes nan action) takes 780.2065596580505 seconds for 300 episodes. Both versions have similar results. The URL for the new version is updated. Added random seeds for numpy & Tensorflow global seed & ops seed achieve better consistency & faster convergence.
Checkout the resulting charts from the program output.
Code on my Github:
Jupyter notebook (The Jupyter notebook, which also contain the resulting charts at the end, can be run directly on Google’s Colab.)
If Github is not loading the Jupyter notebook, a known Github issue, click here to view the notebook on Jupyter’s nbviewer.
fixed feature from target network = \({ f (s_{t+1}) }\)
predicted feature from predictor network = \({ f ^\prime (s_{t+1}) }\)
intrinsic reward = \(r_{i}\) = || \({ f ^\prime (s_{t+1}) }\) - \({ f (s_{t+1}) }\) || \({}{^2}\)
For notations & equations regarding PPO, refer to this post.
Preprocessing, state featurization:
Prior to training, the states are featurized with the RBF kernel.
(states are also featurized during every training batch.)
Refer to scikit-learn.org documentation: 5.7.2. Radial Basis Function Kernel for more information on RBF kernel.
if state_ftr == True:
"""
The following code for state featurization is adapted & modified from dennybritz's repository located at:
https://github.com/dennybritz/reinforcement-learning/blob/master/PolicyGradient/Continuous%20MountainCar%20Actor%20Critic%20Solution.ipynb
"""
# Feature Preprocessing: Normalize to zero mean and unit variance
# We use a few samples from the observation space to do this
states = np.array([env.observation_space.sample() for x in range(sample_size)]) # pre-trained, states preprocessing
scaler = sklearn.preprocessing.StandardScaler()
scaler.fit(states) # Compute the mean and std to be used for later scaling.
# convert states to a featurizes representation.
# We use RBF kernels with different variances to cover different parts of the space
featurizer = sklearn.pipeline.FeatureUnion([ # Concatenates results of multiple transformer objects.
("rbf1", RBFSampler(gamma=5.0, n_components=n_comp)),
("rbf2", RBFSampler(gamma=2.0, n_components=n_comp)),
("rbf3", RBFSampler(gamma=1.0, n_components=n_comp)),
("rbf4", RBFSampler(gamma=0.5, n_components=n_comp))
])
featurizer.fit(
scaler.transform(states)) # Perform standardization by centering and scaling
# state featurization of state(s) only,
# not used on s_ for RND's target & predictor networks
def featurize_state(state):
scaled = scaler.transform([state]) # Perform standardization by centering and scaling
featurized = featurizer.transform(scaled) # Transform X separately by each transformer, concatenate results.
return featurized[0]
def featurize_batch_state(batch_states):
fs_list = []
for s in batch_states:
fs = featurize_state(s)
fs_list.append(fs)
return fs_list
Preprocessing, next state normalization for RND:
Variance is computed for the next states buffer_s_ using
the RunningStats class. During every training batch, the next states are
normalize and clipped.
def state_next_normalize(sample_size, running_stats_s_):
buffer_s_ = []
s = env.reset()
for i in range(sample_size):
a = env.action_space.sample()
s_, r, done, _ = env.step(a)
buffer_s_.append(s_)
running_stats_s_.update(np.array(buffer_s_))
if state_next_normal == True:
state_next_normalize(sample_size, running_stats_s_)
Big picture:
There are two main modules, the PPO and the RND.
Current state, state is passed into PPO.
Next state, state_ is passed into RND.
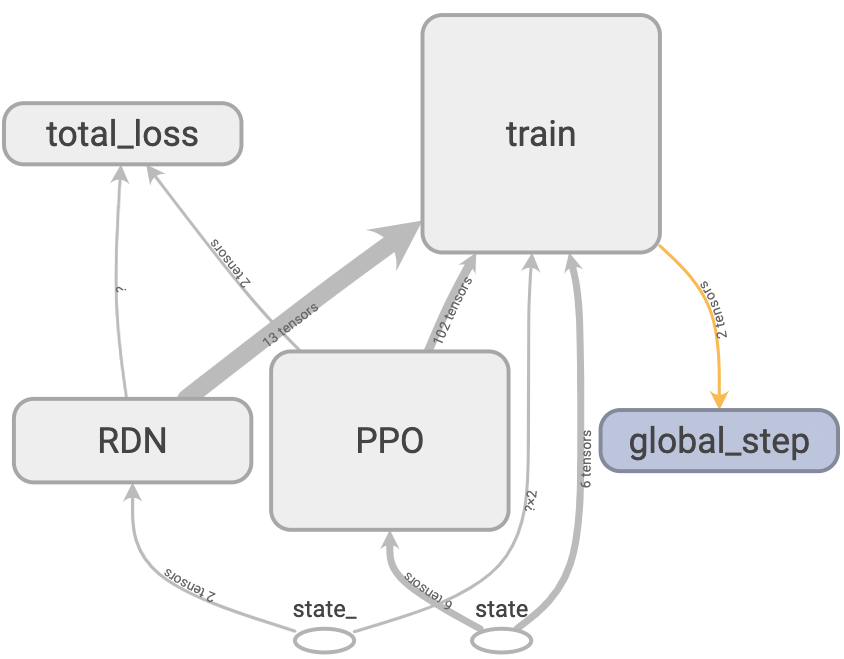
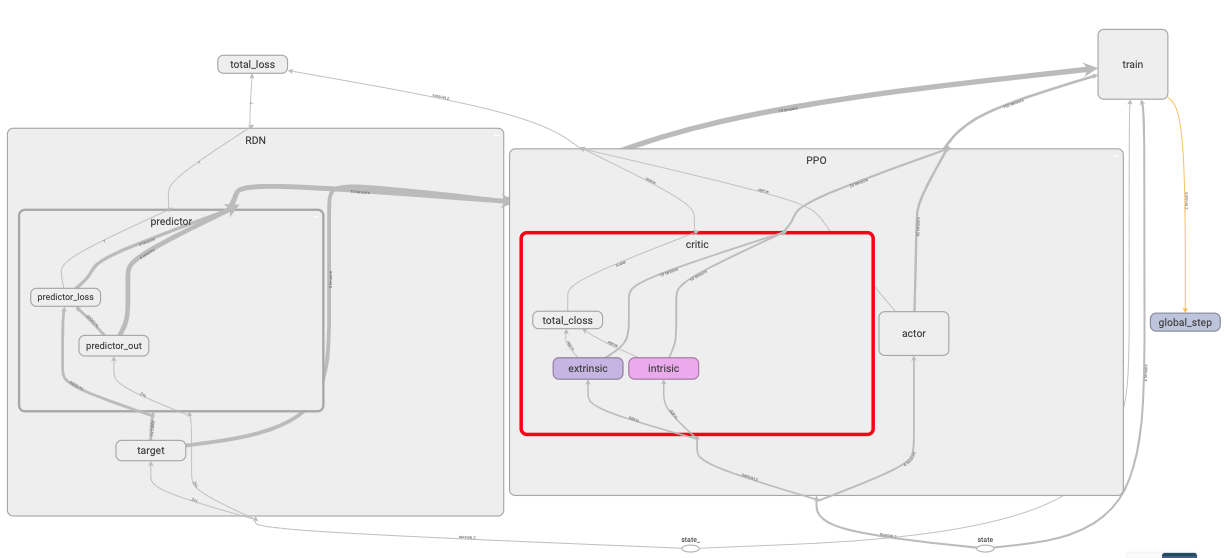
PPO module:
PPO module contains the actor network & the critic network.
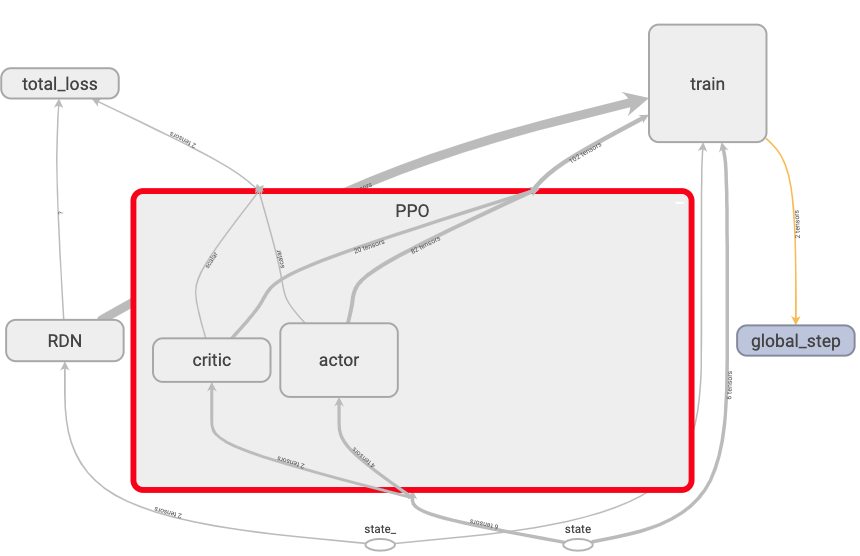
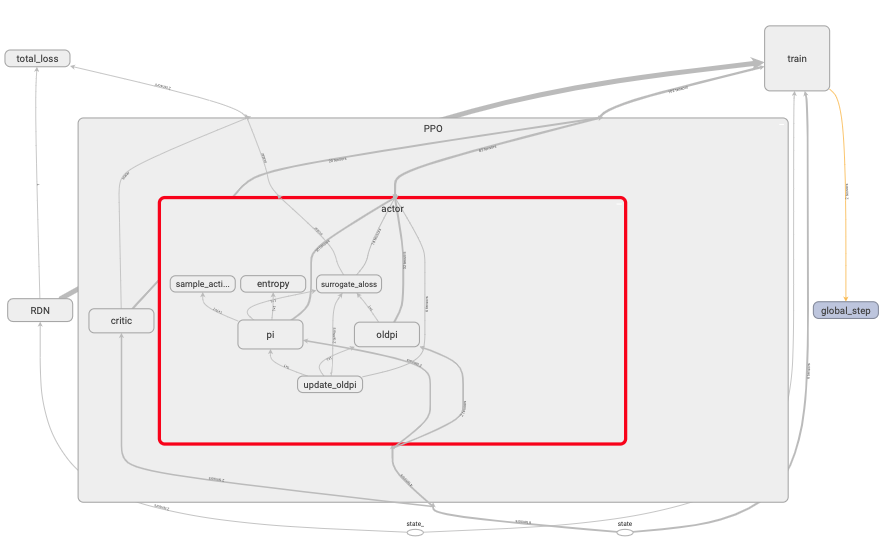
PPO’s actor:
At every iteration, an action is sampled from policy network pi.
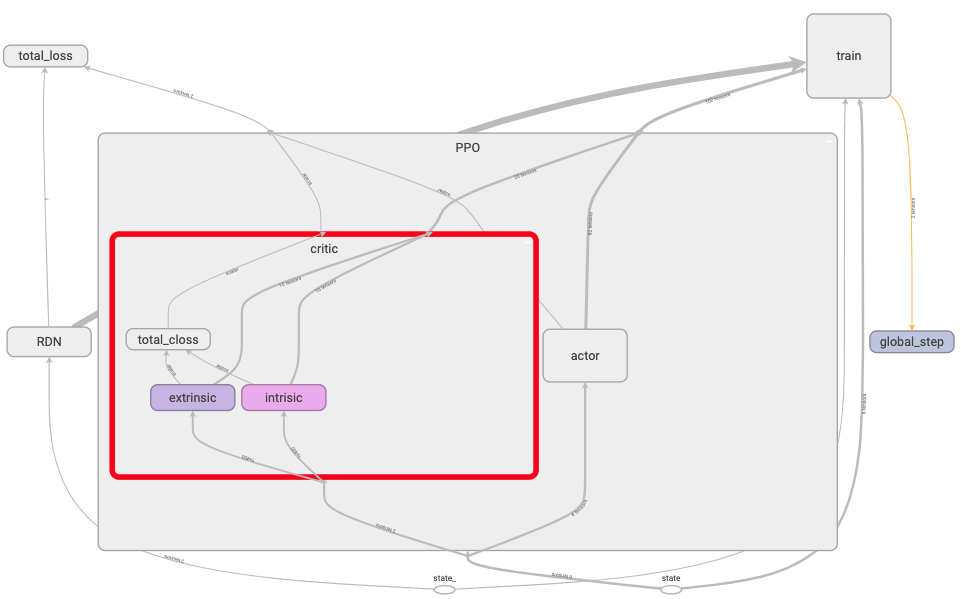
PPO’s critic:
The critic contains two value function networks. One for extrinsic rewards & one for intrinsic rewards. Two sets of TD lambda returns & advantages are also computed.
For extrinsic rewards: tdlamret adv
For intrinsic rewards: tdlamret_i adv_i
The TD lambda returns are used as the PPO’s critics targets in their respective networks while the advantages are summed & used as the advantage in the actor’s loss computation.
RND module:
RND module contains the target network & the predictor network.
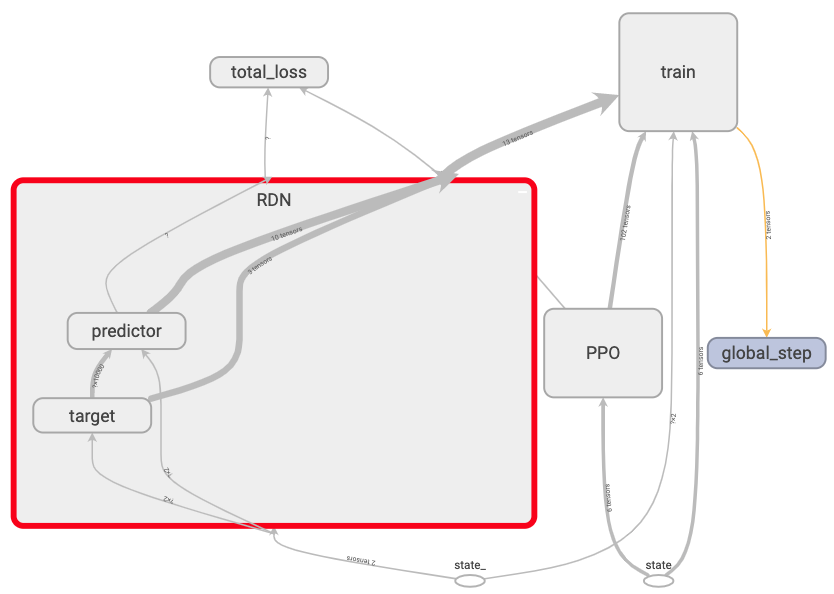
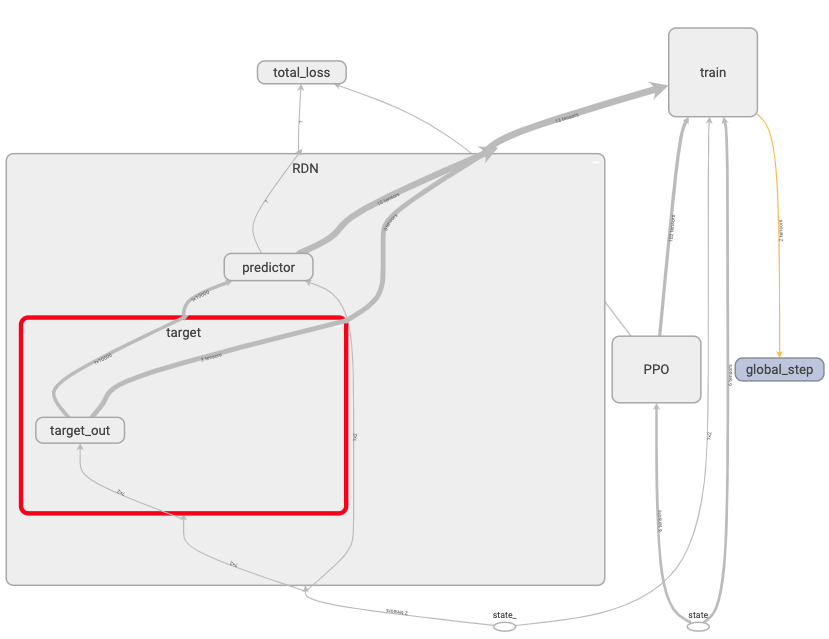
RND target network:
The target network is a fixed network, meaning that it’s never trained.
It’s weights are randomized once during initialization. The target network is
used to encode next states state_. It’s output are encoded next states.
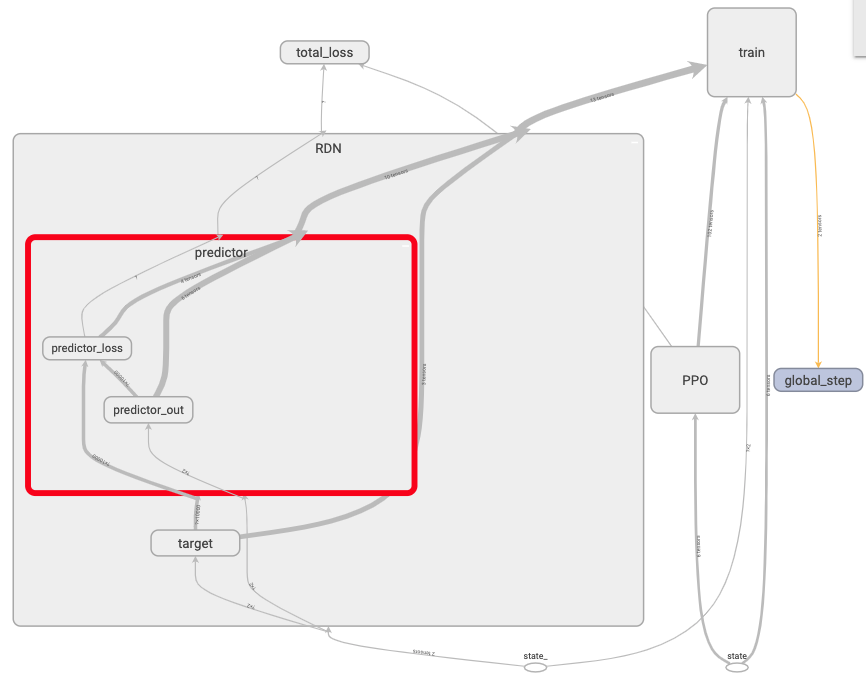
RND predictor network:
The predictor_loss is the intrinsic reward. It is the difference between
the predictor network’s output with the target network’s output. The predictor
network is trying to guess the target network’s encoded output.
All networks used in this program are linear.
The actor module is basically similar to this DPPO code documented in this post.
The difference is in the critic module. This implementation has two value functions in the critic module rather than one.
The predictor_loss is the intrinsic reward.
The actor’s network occasionally returns ‘'’nan’’’ for action. This happens randomly, most likely caused by exploding gradients. Not initializing or randomly initializing actor’s weights results in nan when outputting action.
hit_counter 291 0.97
Number of steps per episode:
Reward per episode:
Moving average reward per episode:
— 385.09387278556824 seconds —
Exploration by Random Network Distillation (Yuri Burda, Harrison Edwards, Amos Storkey, Oleg Klimov, 2018)
Notes on measurement for quantum systems.
Notes on quantum states as a generalization of classical probabilities.
The location of ray_results folder in colab when using RLlib &/or tune.
My attempt to implement a water down version of PBT (Population based training) for MARL (Multi-agent reinforcement learning).
Ray (0.8.2) RLlib trainer common config from:
How to calculate dimension of output from a convolution layer?
Changing Google drive directory in Colab.
Notes on the probability for linear regression (Bayesian)
Notes on the math for RNN back propagation through time(BPTT), part 2. The 1st derivative of \(h_t\) with respect to \(h_{t-1}\).
Notes on the math for RNN back propagation through time(BPTT).
Filter rows with same column values in a Pandas dataframe.
Building & testing custom Sagemaker RL container.
Demo setup for simple (reinforcement learning) custom environment in Sagemaker. This example uses Proximal Policy Optimization with Ray (RLlib).
Basic workflow of testing a Django & Postgres web app with Travis (continuous integration) & deployment to Heroku (continuous deployment).
Basic workflow of testing a dockerized Django & Postgres web app with Travis (continuous integration) & deployment to Heroku (continuous deployment).
Introducing a delay to allow proper connection between dockerized Postgres & Django web app in Travis CI.
Creating & seeding a random policy class in RLlib.
A custom MARL (multi-agent reinforcement learning) environment where multiple agents trade against one another in a CDA (continuous double auction).
This post demonstrate how setup & access Tensorflow graphs.
This post demonstrates how to create customized functions to bundle commands in a .bash_profile file on Mac.
This post documents my implementation of the Random Network Distillation (RND) with Proximal Policy Optimization (PPO) algorithm. (continuous version)
This post documents my implementation of the Distributed Proximal Policy Optimization (Distributed PPO or DPPO) algorithm. (Distributed continuous version)
This post documents my implementation of the A3C (Asynchronous Advantage Actor Critic) algorithm (Distributed discrete version).
This post documents my implementation of the A3C (Asynchronous Advantage Actor Critic) algorithm. (multi-threaded continuous version)
This post documents my implementation of the A3C (Asynchronous Advantage Actor Critic) algorithm (discrete). (multi-threaded discrete version)
This post demonstrates how to accumulate gradients with Tensorflow.
This post demonstrates a simple usage example of distributed Tensorflow with Python multiprocessing package.
This post documents my implementation of the N-step Q-values estimation algorithm.
This post demonstrates how to use the Python’s multiprocessing package to achieve parallel data generation.
This post provides a simple usage examples for common Numpy array manipulation.
This post documents my implementation of the Dueling Double Deep Q Network with Priority Experience Replay (Duel DDQN with PER) algorithm.
This post documents my implementation of the Dueling Double Deep Q Network (Dueling DDQN) algorithm.
This post documents my implementation of the Double Deep Q Network (DDQN) algorithm.
This post documents my implementation of the Deep Q Network (DQN) algorithm.